Инверзни проблем
Као што смо већ у више наврата нагласили, права снага НМПФЗ долази до изражаја код проблема у којима је потребно идентификовати непознате параметре. Разлог томе је што НМПФЗ метода инверзне проблеме третира на исти начин као директне. Важно је само да се проблем постави не дозвољавајући вишезначност, што ћемо демонстрирати на следећем примеру. Замислимо експеримент постављен као на Сл. 15 у коме нам је познат само коефицијент трења \(\mu=0,6\), а не знамо ни масу куглице \(m\) ни коефицијент еластичности опруге \(k\). Задатак нам је да идентификујемо ова два параметра тако што ћемо пустити куглицу да осцилује и на основу њеног кретања дати НМПФЗ да одреди елементе који недостају.
Рецимо да смо визуелно утврдили да је у питању подпригушени случај. Прва стратегија мерења која би могла да буде реално изводљива је да куглицу отклонимо за \(x_0=2\) и само пустимо (\(v_0=0\)), а онда штоперицом одредимо временске тренутке у којима куглица пролази кроз равнотежни положај и да те тренутке забележимо:
t |
1,18 |
3,27 |
5,37 |
7,46 |
9,55 |
x |
0 |
0 |
0 |
0 |
0 |
Дакле, поред граничних и почетних услова \((x_0=2,v_0=0)\) увешћемо и граничне услове типа PointSet који дефинишу вредност моделоване функције у појединим тачкама. Програмски код који имплементира овај инверзни проблем дат је на следећем листингу.
1import deepxde as dde
2from deepxde.backend import tf
3import numpy as np
4import matplotlib.pyplot as plt
5
6m = dde.Variable(0.5)
7mu = 0.6
8k = dde.Variable(2.)
9
10x0, v0 = 2, 0
11
12delta = mu / (2*m)
13w0 = tf.sqrt(k/m)
14
15# Da li je tacka blizu t=0 (provera pocetnog uslova)
16def boundary_l(t, on_initial):
17 return on_initial and np.isclose(t[0], 0)
18
19# Jednacina ODE
20def Ode(t,x):
21 dxdt = dde.grad.jacobian(x,t)
22 dxdtt = dde.grad.hessian(x,t)
23 return m * dxdtt + mu * dxdt + k*x
24
25# x(0)=x0
26def bc_func1(inputs, outputs, X):
27 return outputs - x0
28
29# x'(0)=v0
30def bc_func2(inputs, outputs, X):
31 return dde.grad.jacobian(outputs, inputs, i=0,j=None) - v0
32
33# Resava se na domenu t=(0,10)
34interval = dde.geometry.TimeDomain(0, 10)
35
36# Pocetni uslovi
37ic1 = dde.icbc.OperatorBC(interval, bc_func1, boundary_l)
38ic2 = dde.icbc.OperatorBC(interval, bc_func2, boundary_l)
39
40bc_x = np.array([1.18, 3.27, 5.37, 7.46, 9.55]).reshape(6,1)
41bc_y = np.array([0, 0, 0, 0, 0 ]).reshape(6,1)
42ic3 = dde.icbc.PointSetBC(bc_x, bc_y, component=0)
43
44# Definsanje problema, granicnih uslova, broja kolokacionih tacaka
45data = dde.data.TimePDE(interval, Ode, [ic1, ic2, ic3], 200, 20, solution=func, num_test=100)
46
47layers = [1] + [30] * 3 + [1]
48activation = "tanh"
49init = "Glorot uniform"
50net = dde.nn.FNN(layers, activation, init)
51
52model = dde.Model(data, net)
53
54# Callback funkcija koja stampa varijablu na svakih 1000 epoha
55variable1 = dde.callbacks.VariableValue(k, period=1000)
56variable2 = dde.callbacks.VariableValue(m, period=1000)
57
58model.compile("adam", lr=.001, loss_weights=[0.01, 1, 1, 1], metrics=["l2 relative error"], external_trainable_variables=[k,m])
59losshistory, train_state = model.train(epochs=50000, callbacks=[variable1, variable2])
Објаснићемо само делове који се разликују у односу на директни проблем решен у секцији Имплементација. За почетак, ту су непознати параметри које декларишемо на следећи начин:
m = dde.Variable(0.5)
k = dde.Variable(2.)
У загради се дају почетне вредности параметра. Следеће линије дефинишу поменути додатни PointSet гранични услов (услове) који важе у појединим тачкама унутар домена:
bc_x = np.array([1.18, 3.27, 5.37, 7.46, 9.55]).reshape(6,1)
bc_y = np.array([0, 0, 0, 0, 0 ]).reshape(6,1)
ic3 = dde.icbc.PointSetBC(bc_x, bc_y, component=0)
Како бисмо обезбедили праћење вредности непознатих параметара током обуке, потребно је да поставимо тзв. callback функције, које ће се позивати на сваких 1000 епоха:
variable1 = dde.callbacks.VariableValue(k, period=1000)
variable2 = dde.callbacks.VariableValue(m, period=1000)
Приликом постављања модела постављамо екстерне варијабле за тренирање k и m, док се при позиву тренинга наводе callback функције:
model.compile("adam", lr=.001, loss_weights=[0.01, 1, 1, 1], metrics=["l2 relative error"], external_trainable_variables=[k,m])
losshistory, train_state = model.train(epochs=50000, callbacks=[variable1, variable2])
Након завршеног обучавања, добија се, очигледно погрешно, решење које је приказано на Сл. 23. У односу на аналитичко решење које је постављено користећи вредности параметара m=1 и k=2,25, добијене вредности m=0,287 и k=1,22 се пуно разликују.
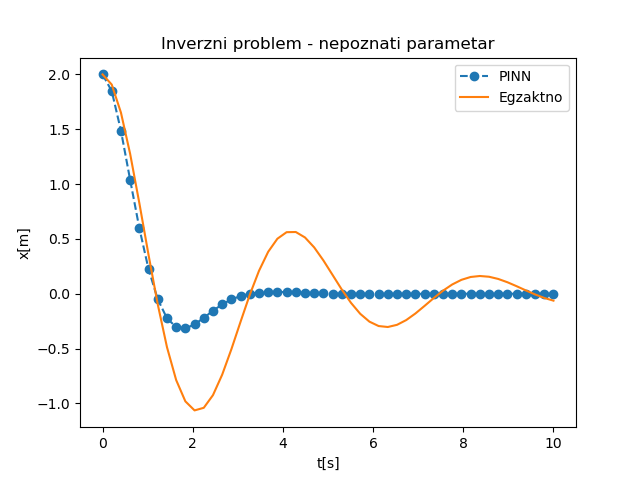
Сл. 23 НМПФЗ решење инверзног проблема са непознатим параметрима. Пронађене вредности су m=0,287 и k=1,22.
Зашто смо добили овако лоше решење? Одговор се крије у лоше постављеним граничним условима који доводе до неједнозначности инверзног проблема. Наиме, постоји више сценарија, тј. парова (m,k) који задовољавају граничне услове постављене само у тачкама проласка тега кроз равнотежни положај. Очигледно је да морамо да додамо још неку тачку ван равнотежног положаја, како бисмо обезбедили једнозначно решење. Замислимо да смо измерили и тренутак када је тег био на највећој негативној удаљености у односу на равнотежни положај и колика је та удаљеност била. Додајмо сада и ту тачку у постављени PointSet, који сада изгледа овако:
t |
1,18 |
3,27 |
5,37 |
7,46 |
9,55 |
2,12 |
x |
0 |
0 |
0 |
0 |
0 |
-1,67 |
Погледом на Сл. 24 одмах се види да је поклапање са аналитичким решењем у овако постављеном проблему скоро па идеално.
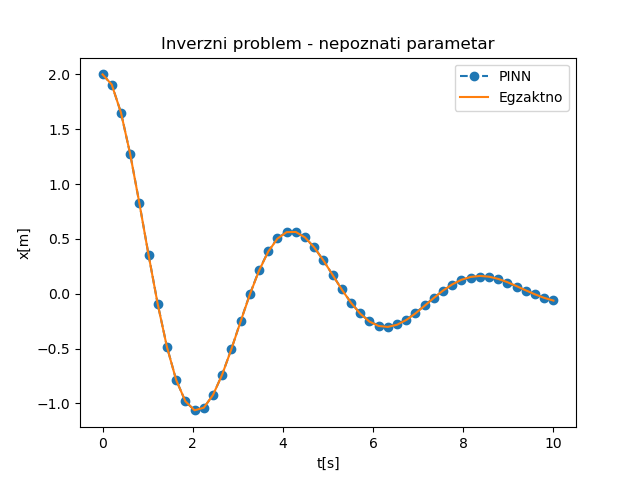
Сл. 24 НМПФЗ решење инверзног проблема са непознатим параметрима. Пронађене вредности су m=0,98 и k=2,26.
Исправност решења додатно потврђују параметри m=0,98 и k=2,26, чије су вредности веома блиске онима које су дате у аналитичкој поставци m=1 и k=2,25. На овај начин смо показали да приступ решавању инверзног проблема, иако методолошки сличан, има специфичности о којима треба водити рачуна. Код директних проблема решење је увек једнозначно, док код инверзних морају да се обезбеде одговарајући услови који у довољној мери детерминишу решење.